MUTUAL PURSUIT CURVES (or curves of the n dogs)

| next curve | previous curve | 2D curves | 3D curves | surfaces | fractals | polyhedra |
MUTUAL PURSUIT CURVES (or curves of the n dogs)
| Problem posed by Lucas in 1877 in the case of an equilateral
triangl [problème des trois chiens, Nouvelles Correspondances
Mathématiques 3 p 175-176].
Paper Polygons of pursuit, Bernhart, 1959 Wikipedia: mice problem Very thorough website in German: did.mat.uni-bayreuth.de/material/verfolgung/node5.html Animation by G. Tulloue: www.sciences.univ-nantes.fr/sites/genevieve_tulloue/Meca/Cinematique/4mouches.php Système différentiel de poursuite, Quadrature 129, p. 29, 2023. |
When n points M1,M2,
,Mn
(traditionally, flies, mice, ladybirds...) chase one another each at the
constant speed, with Mk chasing
Mk+1
(and Mn chasing M1),
the trajectories of these points are mutual pursuit curves.
The movements and trajectories of the pursuers are then
governed by the differential system formed by the n relations  .
.
Note that when ![]() is proportional to
is proportional to ![]() ,
the system becomes linear and resolves exactly.
,
the system becomes linear and resolves exactly.
Case of a triangle ABC (A following B, following C, following A)
|
It can be noted in the particular case below that the two flies that were the furthest apart are the ones who meet first! |
It can be shown that the triangle formed by the dogs
remains similar to itself if and only if the starting triangle is equilateral.
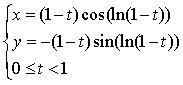
However, if we consider that the dogs can have distinct velocities, then R.K. Miller determined in 1871 that the triangle remains similar to itself if and only if the respective velocities of A,B,C are proportional to In this case, the first Brocard point of the triangle formed by the dogs remains fixed and the dogs meet simultaneously at this point; moreover, the curves described are logarithmic spirals. |
||||
|
|
 where
n is the number of sides of the polygon.
where
n is the number of sides of the polygon.
 where R is the radius, and
where R is the radius, and .
.
|
 |
 |
|
|
|
|
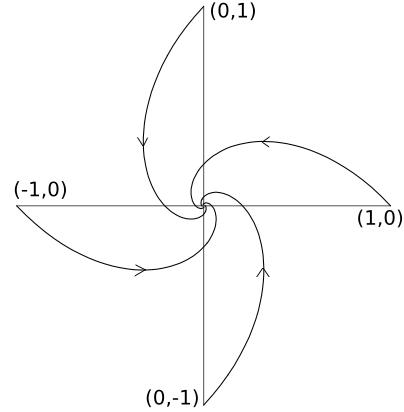
| Demonstration in the case of a square.
The flies constantly form an EFGH square with the
coordinates shown in the figure.
|
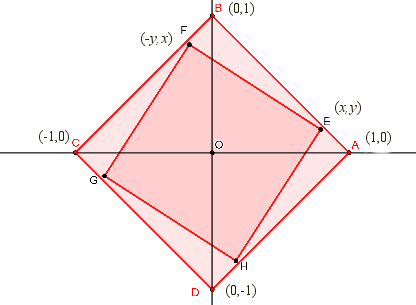
Figure : Elisabeth Busser |
 |
 |
 |
See also similar curves in
3D.
 |
Did the anonymous Ivorian artist who designed this engraving think they were tracing pursuit curves? |
| next curve | previous curve | 2D curves | 3D curves | surfaces | fractals | polyhedra |
© Robert FERRÉOL, Alain ESCULIER 2022




 ,
the flies have a speed
,
the flies have a speed