TRIPLE ORTHOGONAL SYSTEM SURFACES
A triple orthogonal system of surfaces consists in three
given families with one parameter such that at any point common to three
representatives of each family, the three tangent planes of the surfaces
are 2 by 2 orthogonal. This notion generalizes to 3D the notion of double
orthogonal systems of curves.
According to the Dupin theorem, two surfaces taken
among two of the families of the system intersect along curvature
lines.
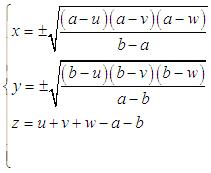
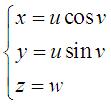
If the three families are given in a parametric
form: 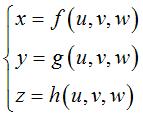 , ,
fixed u, variable v,w for the first family,
fixed v, variable u,w for the second one,
fixed w, variable u,v for the third one,
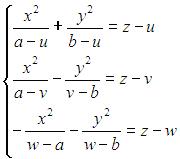
then the three families form a triple orthogonal system
iff 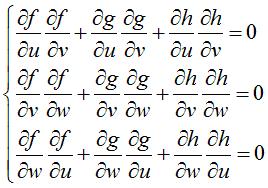
(in other words, the columns of the Jacobian matrix of  are orthogonal to one another).
are orthogonal to one another). |
A first series of examples is provided by a given double
orthogonal system 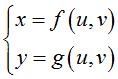 translated perpendicularly to its plane (the three orthogonal families
are composed of two families of cylinders based on the initial curves and
the family of planes orthogonal to the direction of translation); the triple
orthogonal system is parametrized by
translated perpendicularly to its plane (the three orthogonal families
are composed of two families of cylinders based on the initial curves and
the family of planes orthogonal to the direction of translation); the triple
orthogonal system is parametrized by 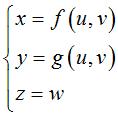 .
.
Some examples (first family, fixed u, in red,
second one, fixed v, in blue, third one, fixed w, in green):
| double orthogonal system |
associated cylindrical triple system |
parametrization
|
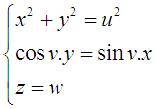
equations of the three families |
name of the coordinate system (u,v,w) |
|
planes
|
|
|
Cartesian coordinates |
|
cylinders of revolution, planes
|
|
|
cylindrical coordinates |
|
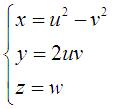
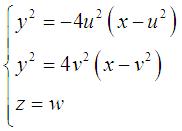
parabolic cylinders, planes
|
|
|
parabolic cylindrical coordinates |
|
elliptic cylinders, hyperbolic cylinders, planes
|
|
|
elliptic cylindrical coordinates |
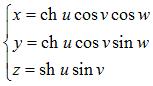
A second series is provided by a given double orthogonal
system  rotated around an axis of its plane (or rather an axis of symmetry to avoid
conical points); the orthogonal families are composed of two families of
surfaces of revolution based on the initial curves and the family of planes
passing by the axis of rotation; if the rotation is around Oz, then
the triple orthogonal system is parametrized by
rotated around an axis of its plane (or rather an axis of symmetry to avoid
conical points); the orthogonal families are composed of two families of
surfaces of revolution based on the initial curves and the family of planes
passing by the axis of rotation; if the rotation is around Oz, then
the triple orthogonal system is parametrized by 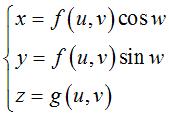 .
.
Some examples:
| double orthogonal system |
associated triple system of revolution |
parametrization |
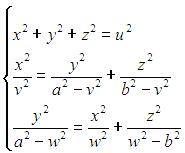
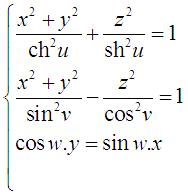
equations of the three families |
name of the coordinate system (u,v,w) |
|
|
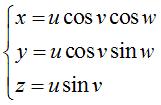
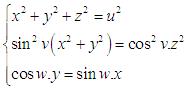
spheres, cones, planes
|
|
|
spherical coordinates |
|
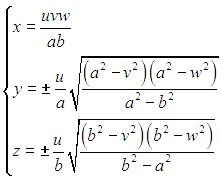
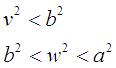
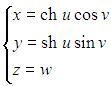
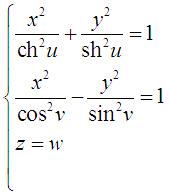
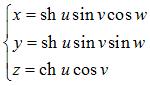
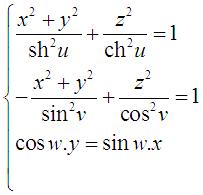
prolate ellipsoids, two-sheeted hyperboloids, planes
|
|
|
prolate ellipsoidal coordinates |
|
|
oblate ellipsoids, one-sheeted hyperboloids, planes
|
|
|
oblate ellipsoidal coordinates |
|
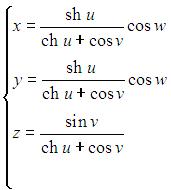
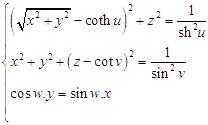
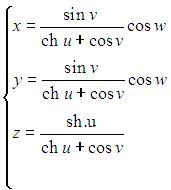
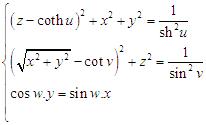
ring tori, spheres, planes
|
 |
|
toroidal coordinates |
|
spheres, spindle tori, planes
|
 |
|
bispherical coordinates |
A third series is obtained by the images by an inversion
of a triple orthogonal system, the resulting system still being a triple
orthogonal system (since the map is conformal).
| initial orthogonal system |
2D equivalent |
triple system |
parametrization |
equations of the three families |
name of the coordinate system (u,v,w) |
|
orthogonal planes (associated to the Cartesian coordinates)
|
|
 = three singular orthogonal beams of spheres
= three singular orthogonal beams of spheres
|

|
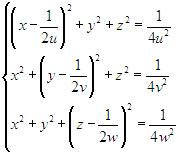
|
trispherical coordinates |
| system associated to the cylindrical coordinates |
the inverse triple orthogonal system of the cylindrical coordinates is
none other than the double system composed of two beams of orthogonal circles
rotated around Oz... |
horn tori, planes, spheres |
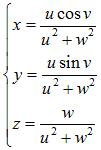
|
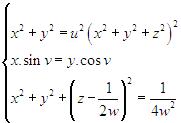 |
inverse cylindrical coordinates |
The spherical coordinates are invariant under inversion.
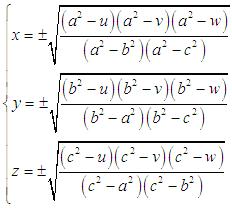
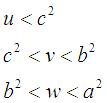
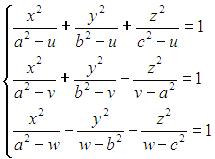
Fourth series: systems of homofocal quadrics.
© Robert FERRÉOL
2017