Deuxième forme
Troisième forme
| surface suivante | surface précédente | courbes 2D | courbes 3D | surfaces | fractals | polyèdres |
SURFACE DE CAYLEY
Cayley
surface, cayleysche Fläche
|
Deuxième forme |
Troisième forme |
| Surface étudiée par Cayley en 1850.
Arthur Cayley (1821-1895) : mathématicien anglais. Voir la programmation avec Povray sur le site d'Alain Esculier. |
| Forme 1
Équation homogène dite tétraédrique :  ,
soit ,
soit  . .
Surface cubique. Les 4 points coniques sont Les 9 droites sont les 6 et les 3 Dans la version affine associée, d'équation |
 |
La surface de Cayley est la surface définie (à homographie près) par l'équation ci-dessus.
C'est la seule surface cubique dont le groupe des homographies
la laissant invariante est le groupe S4
des permutations de 4 objets (cf. l' invariance par les 24 permutations
des coordonnées ![]() )
et c'est aussi la seule surface cubique à posséder 4 points
coniques (maximum possible pour une surface cubique).
)
et c'est aussi la seule surface cubique à posséder 4 points
coniques (maximum possible pour une surface cubique).
Cette surface cubique non lisse
possède 9 droites, qui sont réelles : les arêtes du
tétraèdre formé par les points coniques et 3 autres
droites, qui sont coplanaires.
Une première transformation projective permet de "voir" les 9 droites à distance finie :
| Forme 2
Le changement de coordonnées défini par  donne l'
donne l'
Équation homogène 2 : Les points coniques sont Les 9 droites sont les 6 arêtes du tétraèdre formé par les points coniques, plus  , ,  , ,  . .
Équation cartésienne affine associée
: |
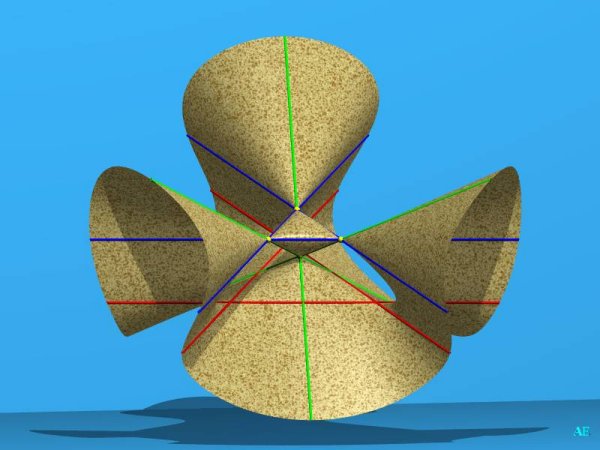
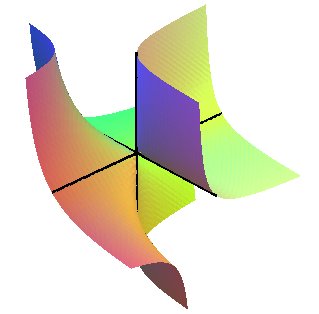
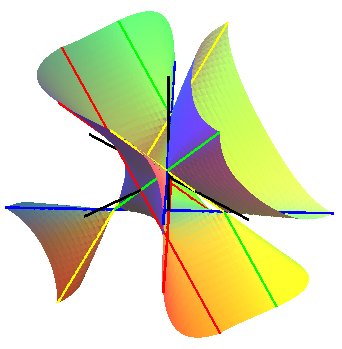
 Les axes du repère sont en noir, les trois autres
arêtes du tétraèdre en bleu, et les 3 droites Dans ce cas, on montre que la surface de Cayley est le lieu des points dont les projetés sur les quatre plans-faces du tétraèdre des points coniques sont coplanaires. C'est en quelque sorte la généralisation à l'espace du problème du lieu des points dont les projetés sur les côtés du triangle sont alignés, lieu qui est, lui, le cercle circonscrit au triangle (cf droite de Simson). |
Une deuxième transformation projective permet d'obtenir une vue affine où la surface est invariante par les 24 isométries du tétraèdre régulier (mais 3 des 9 droites sont rejetées à l'infini) :
| Forme 3
Le changement de coordonnées défini par  donne l'
donne l'
Équation homogène 3 : Les points coniques sont Les neuf droites sont les 6 arêtes du tétraèdre et Équation cartésienne affine associée : Les points coniques sont formant un tétraèdre régulier dont les 6 arêtes sont les droites La rotation d'un huitième de tour définie par  donne
pour équation cartésienne : donne
pour équation cartésienne : 
Le volume de la partie tétraédrique vaut  . .
Sous cette forme, la surface de cayley est une surface tétraédrique de Goursat. |
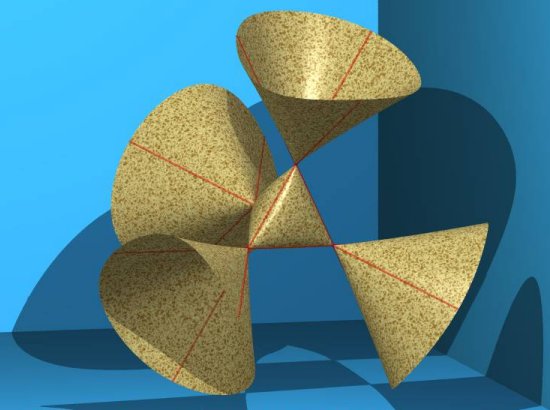
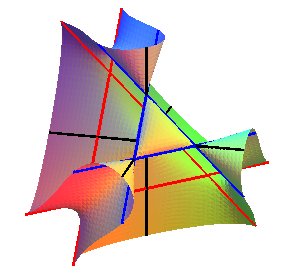
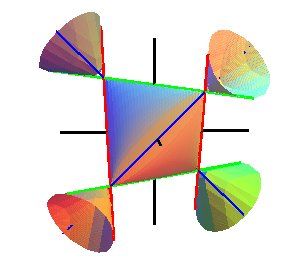 Vue avec les 3 axes de coordonnées (en noir) et les 6 droites incluses. |
La troisième transformation projective ci-dessous
permet d'obtenir la forme dite "pentaédrique" que possède
toute surface cubique (théorème de Sylvester-Clebsch) :
| Forme 4
Le changement de coordonnées défini par  donne l'
donne l'
Équation homogène 4 : Les points coniques sont Les neuf droites incluses sont les 6 arêtes du tétraèdre et Équation cartésienne affine associée : Les points coniques sont En posant Équation homogène dite "pentaédrique" dans 
(comparer avec l'équation pentaédrique de la surface de Clebsch). |
Vue avec les 6 arêtes du tétraèdre
(en bleu, jaune et vert) et les 3 droites Lien vers une applet permettant de manipuler la figure formée par les droites incluses dans la surface. |
Ne pas confondre avec les surfaces réglées de Cayley.
Vue de la forme 2 réalisée par Alain Esculier , la surface ayant subi une affinité de sorte que le tétraèdre central soit régulier
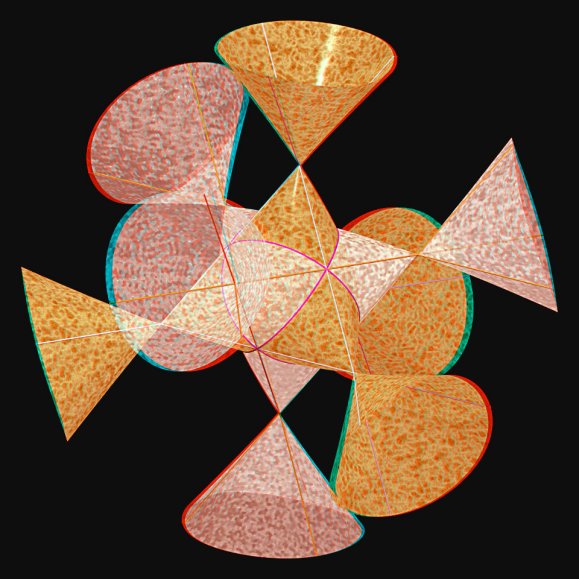
Vue de la forme 4 réalisée par Alain Esculier
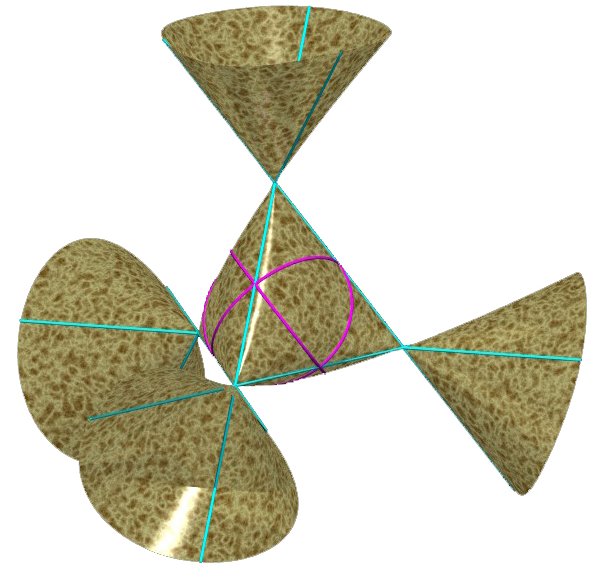
Vue de la forme 3 ![]() ; en rose, les sections par les 3 plans de coordonnées, qui sont
des cercles.
; en rose, les sections par les 3 plans de coordonnées, qui sont
des cercles.
À droite, composé de deux surfaces (anaglyphe à
regarder avec des lunettes rouge/cyan).
| surface suivante | surface précédente | courbes 2D | courbes 3D | surfaces | fractals | polyèdres |
© Robert FERRÉOL, Jacques MANDONNET, Alain ESCULIER 2012
 ,
, ,
,  .
.