 ,
yielding, when
,
yielding, when  ,
i.e.
,
i.e. | next curve | previous curve | 2D curves | 3D curves | surfaces | fractals | polyhedra |
ORTHOGONAL PURSUIT CURVE, DUPORCQ CURVE
| Curve studied by Duporcq and Mannheim
in 1902, Balitran
in 1914, Egan
in 1919, Masurel
in 2014.
Ernest Duporcq (1873-1903): French mathematician. Other name: crab curve. See also: Walter Wunderlich, Über die Hundekurven mit konstantem Schielwinkel, Monatshefte für Mathematik, 1957, Volume 61, Issue 4, pp 299-303. |
| Differential system: ,
yielding, when ,
i.e. |
| The orthogonal pursuit curves are the trajectories of
a point M the motion of which is always in a direction perpendicular
to that of the other moving point M0
(the pursuee), the two moving points having proportional speeds Given the trajectory of M0, the trajectory of M is therefore defined in this case by the fact that (MM0 ) is perpendicular at M to its trajectory, and the curvilinear abscissa of M is proportional to that of M0: One can imagine a crab at M always walking face to face with the pursuee M0 and these curves could be called "(pursuit) curves of the crab". |
 |
I) In the case where M0
has a linear movement, the trajectories of the "pursuer" are called "Duporcq
curves".
Egan proved that the vector ![]() then has the same movement as a body in Newtonian attraction, and therefore
describes a conic with eccentricity e (hence
the choice of the letter e for the ratio between the speeds, instead
of the more classic k).
then has the same movement as a body in Newtonian attraction, and therefore
describes a conic with eccentricity e (hence
the choice of the letter e for the ratio between the speeds, instead
of the more classic k).
First case: ![]() ,
elliptic case.
,
elliptic case.
Cartesian parametrization: 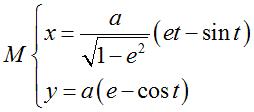 , ,  , ,  . .
Curvilinear abscissa:  . . |
| Opposite, in blue, the elliptic movement of the vector The Duporcq curve is, in this case, the image by a scaling in one direction with ratio  of an elongated cycloid with ratio
of an elongated cycloid with ratio NOTA 1: it is the only scaling that allows to integrate the curvilinear abscissa thanks to elementary functions. NOTA 2: in the formulas above, and as it can be noticed in the animation opposite, the speeds of M and M0 are proportional, but not constant. |
 |
Second case: ![]() ,
parabolic case.
,
parabolic case.
a) the pursuer and the pursuee have, at a given time,
their speeds in the same direction: the pursuer evidently follows a line
parallel to that followed by the pursuee.
b) the pursuer and the pursuee have, at a given time, their speeds in opposite directions.
Cartesian parametrization:  , , , , 
Curvilinear abscissa: |
| Opposite, in blue, the parabolic movement of the vector The Duporcq curve is none other, in this case, than the Tschirnhausen cubic. NOTA: the movement of M is the composition of a
parabolic motion |
 |
Third case: ![]() ,
hyperbolic case.
,
hyperbolic case.
a) the pursuer and the pursuee are at the same point at a given time: they follow to secant lines.
This case is excluded in the following.
b) The pursuer and the pursuee have, at a given time,
their speed in the same direction:
Cartesian parametrization: , ,  , ,
Curvilinear abscissa:  . .
Opposite, in blue, the hyperbolic movement of the vector |
 |
c) the pursuer and the pursuee have, at a given time,
their speeds in opposite directions:
Cartesian parametrization:  , ,  , ,  . .
Curvilinear abscissa:  . .
Opposite, in blue, the hyperbolic movement of the vector |
 |
REMARK: Mannheim proved that the Duporcq curve with parameter
e is the roulette with linear
base of the pole of the Sturm spiral
satisfying ![]() .
.
II) Case where the pursuee describes
any curve:
Vectorial differential equation:  ,
that translates into the differential system: ,
that translates into the differential system:
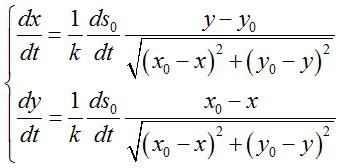 ( ( |
For a pursuee on the circle with centre O and radius
R, we get the differential system: 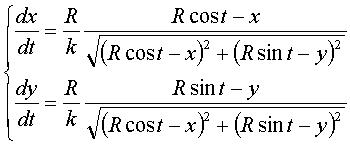 which enables to draw the curves thanks to a software.
which enables to draw the curves thanks to a software.
|
An example with k = 1. |
An example with k = 1/3. |
The shadowing curve
associated to the point describing a circle (in blue below) and to a point
on the circle (the tree) provides a circular special case of the
curve of the pursuer associated to a circle.
If Below, an example with k = 1/2, |
 |
 |
 |
VARIATION (based on an idea of Alain Esculier): the speed
of the pursuer is no longer proportional to that of the pursuee, but to
its distance from it.
Vectorial differential equation:  ,
which translates into the linear differential system: ,
which translates into the linear differential system:  . .
Equations of the movement of the pursuer:  . . |
I) Linear pursuee.
For a pursuee (vt, 0), equations of the movement
of the pursuer passing by (0, b):
 (a = v/k).
(a = v/k).
Therefore, it is a trochoid with ratio  ,
which is a cycloid if ,
which is a cycloid if |
 |
II) Circular pursuee.
For a pursuee 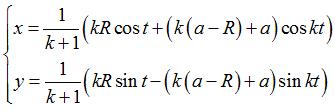 .
It is an epitrochoid when .
It is an epitrochoid when |
 |
|
When 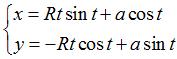 ,
which is none other than an involute
of a circle (more precisely, involute of the circle described by the
pursuee). ,
which is none other than an involute
of a circle (more precisely, involute of the circle described by the
pursuee). |
 |
| next curve | previous curve | 2D curves | 3D curves | surfaces | fractals | polyhedra |
© Robert FERRÉOL
2017
 and a translation.
and a translation.