PURSUIT CURVE
| next curve | previous curve | 2D curves | 3D curves | surfaces | fractals | polyhedra |
PURSUIT CURVE
| Curve studied by Leonardo da Vinci and Pierre Bouguer
in 1732, Du Boisaymé in 1811, Dunoyer
in 1906, and Morley
in 1921 (circular case).
Other name: dog curve. |
Vectorial differential equation:  ,
that translates into the differential system: ,
that translates into the differential system:
 ,
or ,
or  . . |
| The notion of pursuit curve refers to the trajectory
of a moving point M (the dog or the chasing plane) the movement
of which is, at every instant, oriented in the direction of another moving
point M0 (the hare, or the chased
plane), the trajectory of which is called escape curve. In general,
movements of M and M0 are
considered to be uniform, with speeds V and V0
=
kV.
Given the trajectory of M0, the trajectory of M is defined in this case by the fact that (MM0 ) is tangent at M to its trajectory, and the curvilinear abscissa of M is proportional to that of M0: |
 |
As one might expect, the dog catches the hare with certainty if and only if it runs faster than it (k < 1). When the two speeds are equal, then the distance between the dog and the hare tends to a constant a, and the curve of the dog tends to become the tractory of that of the hare with a leash of length a.
I) Simplest case: the escape curve is linear.
The hare describes Oy at speed V, and the
dog chases it at speed V/k.
| If the coordinates of the dog are (x, y), then the data translates into the equations: |  |
| which provide the differential equation of the trajectory of the dog: |  ,
i.e. ,
i.e. |
| If the dog is at A with coordinates (a, b) when the hare is at O, then the first integral is: |  where where  |
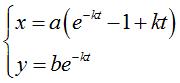
| and we get the curve with equation: | with  if
k
¹ 1
if
k
¹ 1
and  if
k = 1
if
k = 1 |
| and the kinematic equation is given by: |  if k ¹ 1
if k ¹ 1
|
The curve is algebraic iff k is rational: if k = p/q with p and q coprime, then the degree is 2p when k > 1 and p + q when k < 1.
In particular, when k = 1/2, we get a half-Tschirnhausen
cubic (complete equation: ![]() ).
).
The dog catches the hare iff k < 1, and it catches
it at (0, b - f(a)), i.e.  if b = 0.
if b = 0.
When k = 1, the distance between the dog and the
hare goes to a constant, equal to c/2.

in red: the dog runs faster than the hare: it catches it. in green: it runs as fast: no catch possible, and in blue, even less... |
The dog has the same speed as the hare: their distance goes to a constant. |
Note that if the dog were intelligent and ran in a straight
line with anticipation, it could catch the hare iff  (for
b
> 0) and therefore could always catch it if it ran just as fast.
(for
b
> 0) and therefore could always catch it if it ran just as fast.
The dog curve for  is the caustic by reflection for vertical
incident rays of the generalised parabola
is the caustic by reflection for vertical
incident rays of the generalised parabola  with
with  ;
opposite, the case k = 2 (cubical parabola). ;
opposite, the case k = 2 (cubical parabola).
In the case k = 1, the dog curve is the caustic by reflection for vertical incident rays of a logarithmic curve. |
 |
See also the anallagmatic spirals, which are the wheels associated to these pursuit curves.
II) Case of a circular
escape curve (that is said to have been solved only
in 1921).
For the circle with centre O and radius R,
we get the differential system: 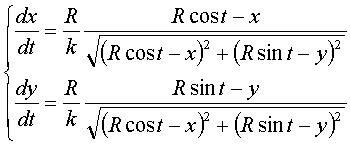 that enables us to trace the curves thanks to some software.
that enables us to trace the curves thanks to some software.
The dog catches up with its master again iff k
< 1; when k = 1, the distance dog-master goes to 0, but it does
not catch up with them; and when k ³
1, the curve has the circle with centre O and radius R/k
as an asymptotic circle, and the distance dog-master goes to  .
.
 |
 |
 |
| Vdog = 2 Vmaster: the dog catches up with the master. | Vdog = Vmaster: the dog catches up with the master... at infinity. | Vdog = 1/2 Vmaster: the distance from the dog to the
master goes to  and it ends up turning around a circle with radius R/2.
and it ends up turning around a circle with radius R/2. |
VARIATION (based on an idea of Alain Esculier): the speed
of the dog is no longer proportional to that of the master, but to their
distance.
Vectorial differential equation: 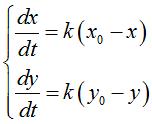 . .
Equations of motion for the dog: 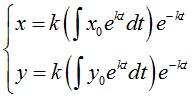 . . |
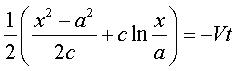
I) Linear escape curve
For a master (vt, 0), equations of motion for
a dog passing by (0, b):
 (a = v/k).
(a = v/k).
Trajectory of the dog:  . .
The speed of the dog goes to that of the master, and their distance goes to v/k. |
 |
II) Circular escape curve.
For a master 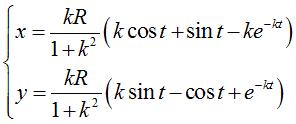 . .
The trajectory of the dog has the the circle with centre O and radius  as its asymptote, its speed goes to
as its asymptote, its speed goes to 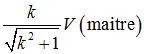 ,
and its distance to the master goes to ,
and its distance to the master goes to  . . |
 |
A generalisation consists in considering the pursuit curves
when the velocity vector of the dog forms a constant angle with the line
that
joins it to the master; the simplest case is that where the master does
not move: the dog follows a logarithmic
spiral.
The case of a right angle is studied at
Duporcq
curve.
One can also consider 3D pursuit curves, and study pursuit systems.
For other curves travelled on by dogs, see the
swimming
dog curve (dog swimming against the current towards its master on the
bank) or the conchoid (dog constantly
pulling on its leash in the direction of a fixed point).
Compare to the shadowing
curve.
| next curve | previous curve | 2D curves | 3D curves | surfaces | fractals | polyhedra |
© Robert FERRÉOL 2017
 if k = 1.
if k = 1.