| next curve | previous curve | 2D curves | 3D curves | surfaces | fractals | polyhedra |
CURVE OF THE SLIDER-CRANK MECHANISM
|
|
|
| Curve studied by Bérard in 1820 and Ruiz-Castizo
in 1889.
Other name: Ruiz-Castizo's quartic. |
The curve of the slider-crank mechanism is the
locus of a fixed point M on the plane linked to the bar [PQ]
(called the connecting rod) of an articulated mechanism (OPQ),
O being fixed and Q being constrained to move on a line (D)
(the drawer, or piston). In other words, the curve of the
slider-crank mechanism is the locus of a point linked to a segment line
of constant length joining a circle (C) and a line (D).
 |
Let A(0, a) be the projection of O
on (D), OP = b, PQ = c.
Using lower case letters for the affix of a point, we have: With Cartesian parametrization: 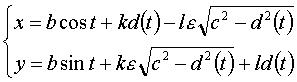 ,
where ,
where Specifically, the motion of Q 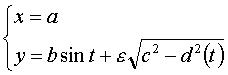 is not sinusoidal.
is not sinusoidal.
Bicircular quartic (?). Cartesian equation when M is on the line (PQ) (i.e. l = 0): |
The curve is not empty if and only if a £ b + c, and in that case it is connected iif b £ a + c (?).
When M is on the connecting rod, the equation above
shows that the curve is then a polyzomal
curve, medial between two ellipses: 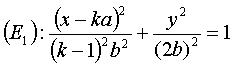 ,
and
,
and 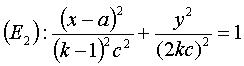 .
.
In particular:
| - when a = 0 ((D) passes by O) and k = -1, these two ellipses are concentric circles: the associated curves are the quartics of Bernoulli. See also on this page the base and rolling curve of the planar movement on the associated plane. |  |
| - when c = a + b and k = -1, these two ellipses are tangent circles: the associated curves are the double heart curves. |  |
| - when a = 0 and b = c, the curve of the slider-crank mechanism is composed of a circle and an ellipse (in fact, we find the construction of an ellipse with a strip of paper). |
 |
| This device allows for a linear, almost sinusoidal motion;
on the right is the representation of the movement of Q for a
= 0, b = 1, c = 3.
See also an application to Mercedes's windscreen wiper. |
 |
If the circle (C) is replaced by any conic, we get all the polyzomal curves.
If the line (D) is replaced by a circle, we get a curve of the three-bar mechanism.
If the connecting rod is no longer constrained to have its end sliding on a line but is only constrained to slide while passing through a fixed point, we get the conchoids of circles.

| next curve | previous curve | 2D curves | 3D curves | surfaces | fractals | polyhedra |
© Robert FERRÉOL 2017