| next curve | previous curve | 2D curves | 3D curves | surfaces | fractals | polyhedra |
MATING GEAR PROFILES
| Notion studied by Euler and by Miquel
in 1838.
Other name, given by Miquel: syntrepent curves, literally "that turn together". |
Two curves ![]() and
and ![]() are
called mating profiles associated to the centres of rotation O1
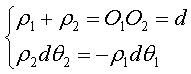
and O2 (the gear hubs) if
are
called mating profiles associated to the centres of rotation O1
and O2 (the gear hubs) if ![]() can turn around O1 and
can turn around O1 and ![]() around O2 so that the two curves
always are in contact (i.e. tangent without slipping on one another).
around O2 so that the two curves
always are in contact (i.e. tangent without slipping on one another).
The get the curve ![]() when the curve
when the curve ![]() ,
the hub O1 and the distance d
= O1O2
are given, one only has to determine the movement
of a plane over a fixed plane the base of which is
,
the hub O1 and the distance d
= O1O2
are given, one only has to determine the movement
of a plane over a fixed plane the base of which is ![]() and a roulette of which is the circle with centre O1
and radius d: the rolling curve is then the curve
and a roulette of which is the circle with centre O1
and radius d: the rolling curve is then the curve ![]() .
.
Writing
|
Remark: By the Descartes theorem, the contact point between the two mating profiles is always aligned with the two hubs.
Examples:
- if ![]() is a circle with radius a and the hub is at its centre,
is a circle with radius a and the hub is at its centre, ![]() is a circle with radius |d - a|.
is a circle with radius |d - a|.
- if ![]() is linear, located at distance a from O, then the equation
of
is linear, located at distance a from O, then the equation
of ![]() is
is  ,
which gives:
,
which gives:
if d > a: 
with 
 |
if d = a:  |
if d < a: 
with  (polygasteroid with
e
> 1)
(polygasteroid with
e
> 1)
|
 (the hub is therefore a focus),
(the hub is therefore a focus),  ,
where
,
where  (n represents the number of turns completed by
(n represents the number of turns completed by  is the semi-major axis of the ellipse, the distances to the hubs are given
by
is the semi-major axis of the ellipse, the distances to the hubs are given
by Case n = 1 (i.e. k = 2):
 |
Case n = 2:   |
 |
  |
Remark: if ![]() is a hyperbola, the same property holds, but is not illustrated here, because
the hyperbola is not a closed curve. See the case n = 1 on the page
of the hyperbola.
is a hyperbola, the same property holds, but is not illustrated here, because
the hyperbola is not a closed curve. See the case n = 1 on the page
of the hyperbola.
| - if This mechanism was discovered by the astronomer Ole Rømer. It is used in the "varistart" system, and allows for a progressive increase of the rotation speed of a gear.  |
 |
| - if the parametrization of 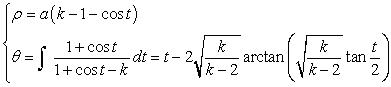
(d = ka). Opposite, the case k = 18/5. |
The mouth with the heart... |
| if the parametrization of 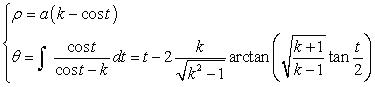
(d = ka). Opposite, the case k = 5/3. |
 |
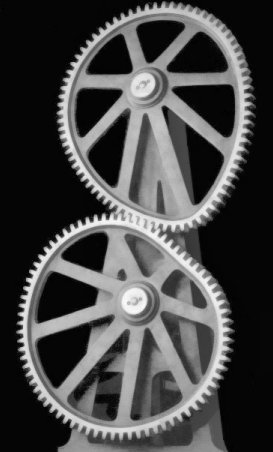
| Schroeder
gears dating from 1867, coming from the Musée des Arts et Métiers.
The bottom curve See also this link. |
  |
When the hub of one of the gears is at infinity, we get
a wheel-road couple.
| We saw above that if we attach one of the gears and that
we make the other one roll on it, the latter's hub describes a circle.
This enables to imagine "Shaddock" vehicles like the one represented opposite...
(by Alain Esculier: see at the bottom of this
page)
For similar vehicles, but with a linear motion, see the next page. |
 |
See also the hyperboloid gears, generalisation to space
of this planar notion, at the bottom of this
page.
| next curve | previous curve | 2D curves | 3D curves | surfaces | fractals | polyhedra |
© Robert FERRÉOL , Jean LEFORT, Alain ESCULIER 2017
 .
. .
.
 .
.
 .
. .
.
 .
.