WHEEL-ROAD COUPLE
| next curve | previous curve | 2D curves | 3D curves | surfaces | fractals | polyhedra |
WHEEL-ROAD COUPLE
| Notion studied by Gregory in 1668, Steiner in 1846 and
Habich in 1881.
See this page by Alain Esculier, for all the animations he created, only a part of which is presented here. |
Two curves ![]() and
and ![]() form a wheel-road couple if
form a wheel-road couple if ![]() can roll without slipping on
can roll without slipping on ![]() so that a fixed point on the plane of
so that a fixed point on the plane of ![]() (the wheel hub) has a linear trajectory in the fixed plane. It is therefore
a movement of a plane over a fixed plane
the base of which is
(the wheel hub) has a linear trajectory in the fixed plane. It is therefore
a movement of a plane over a fixed plane
the base of which is ![]() ,
the rolling curve of which is
,
the rolling curve of which is ![]() and a roulette of which is linear.
and a roulette of which is linear.
The curves ![]() and
and ![]() can
also be considered as two mating gear profiles,
the hub of
can
also be considered as two mating gear profiles,
the hub of ![]() being located at infinity (consider the movement in a frame linked to the
wheel hub).
being located at infinity (consider the movement in a frame linked to the
wheel hub).
If the wheel  . .
From a wheel  ,
we get the road ,
we get the road  where F is a primitive of fg' (Grégory transformation).
where F is a primitive of fg' (Grégory transformation).
Conversely, from a road  ,
we get the wheel ,
we get the wheel  where H is a primitive of
where H is a primitive of If the wheel is defined by its pedal equation:  . . |
This notion was initially studied, not for a practical
use of noncircular wheels, but because the calculations of the curvilinear
abscissa are the same for the two curves (for the road, in Cartesian coordinates,
and for the wheel, in polar coordinates), so that the rectification of
one of them gives that of the other one.
There exist 2 theorems providing a geometrical definition
of the road when the wheel is given.
| 1) Steiner-Habich theorem:
the road is the roulette with linear base of the negative pedal of the wheel; more precisely, if the negative pedal In other words: given a curve |
When (C) rolls on (D), a point M of the plane linked to (C) describes a roulette (R) in the fixed plane. The pedal (P) of (C) with respect to M cuts (D) at the projection M' of M on (D). It can be proved that the curve (P'), symmetrical image of (P) about the perpendicular bisector of [MM'], rolls without slipping on the curve (R), which proves the Habich theorem, since M' describes (D). |
2) Mannheim theorem:
Given a curve ![]() and a point, the radial curve of
this curve with respect to this point and its Mannheim
curve form a wheel-road couple.
and a point, the radial curve of
this curve with respect to this point and its Mannheim
curve form a wheel-road couple.
Examples:
If the wheel is circular with a centred hub, the road
is a line parallel to the trajectory of the hub and it is the only case
where this happens, but there is more than just this well-known case!
| With a circular wheel, but a hub on the boundary, the
road is circular; we get the La Hire system.
The curve |
 |
| With a circular wheel and a hub anywhere, the curve |
|
If the wheel is linear (circle with infinite radius),
the curve 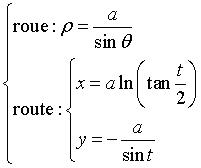 . .
The curve |
 |
The case of a linear road not parallel to the trajectory
of the hub gives a wheel with the shape of a logarithmic
spiral: 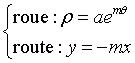 . .
This property is at the base of the spring-loaded
camming device. used for rock climbing.
It could also be used to imagine vehicles with wheels composed of portions of logarithmic spirals rolling on serrated roads. |
  |
If the wheel is an Archimedean
spiral and the hub its centre, then the road is a parabola: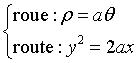 . .
The curves |
 |
If the wheel is a Fermat spiral and the hub is its centre,
then the road is a cubic
parabola: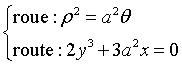 |
 |
If the wheel is a hyperbolic
spiral and the hub is its centre, then the road is a logarithmic
curve: 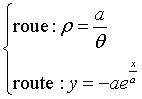 . . |
 |
If the wheel is an ellipse and the hub is at one of the
foci, then the road is a sinusoid: 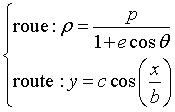
See also the roulette of Delaunay. |
 |
If the wheel is an ellipse and the hub is its centre,
then the wheel-road couple is:
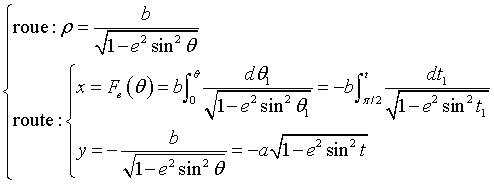
Using the elliptic function of Jacobi dn (JacobiDN in Maple), the equation of the road is 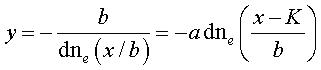 .
.
The curve See also the Sturm roulette. |
 |
If the wheel is a parabola, and the hub its focus, then
the road is also a parabola!
 . .
The curve |
  |
If the wheel is a Kampyle
of Eudoxus, and the hub its centre, the road is once again a parabola:
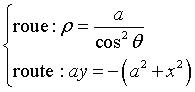 . .
The curve |
 |
If the wheel is a cardioid
and the hub is at its cuspidal point, then the road is a cycloid: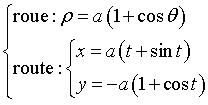 . .
The curve |
Note that the tips of the cycloid have to be slightly trimmed because otherwise they would enter into the wheels at the cuspidal point. |
If the wheel is a tractrix
spiral and the hub is on its pole, then the road is a tractrix: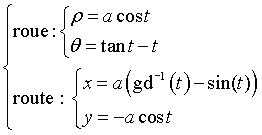
The curve |
 |
If the wheel is a rose
and the hub is at the pole, then the road is elliptic 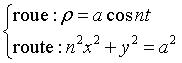 ;
the case n = 1 is none other than the one at the top of this table. ;
the case n = 1 is none other than the one at the top of this table.
The curves In the case of a wheel shaped like a conchoid
of a rose, the road is a trochoid scaled in one direction.
|
Case n = 2 |
| If the road is circular and the hub describes a tangent
to the circle, then the wheel is an inverse
Norwich spiral.
(Remember that if the hub describes a diameter of the circle, then the wheel is circular!) |
 |
If the wheel is a sinusoidal
spiral with parameter n, then the road is a Ribaucourt
curve with parameter 1/n, and the curve ![]() is a sinusoidal spiral with parameter n/(1 n).
is a sinusoidal spiral with parameter n/(1 n).
We find several examples given above:
| n | wheel | road | (G) |
| -1/2 | parabola | parabola | Tschirnhausen cubic |
| -1 | line | catenary | parabola |
| 1/2 | cardioid | cycloid | circle |
| 2 | lemniscate of Bernoulli | rectangular Sturm roulette | rectangular hyperbola |
See also the wheels associated to a Tschirnhausen cubic and, more generally, the wheels associated to pursuit curves.
Compare with the
roulettes with linear base.
| next curve | previous curve | 2D curves | 3D curves | surfaces | fractals | polyhedra |