 ,
menant, pour
,
menant, pour  ,
soit
,
soit | courbe suivante | courbe précédente | courbes 2D | courbes 3D | surfaces | fractals | polyèdres |
COURBE DE POURSUITE ORTHOGONALE, COURBE DE DUPORCQ
Orthogonal
pursuit curve, Duporcq curve, Querläuferkurve, Duporcqsche Kurve
| Courbe étudiée par Duporcq et Mannheim
en 1902, Balitran
en 1914, Egan
en 1919, Masurel
en 2014.
Ernest Duporcq (1873-1903) : mathématicien français. Autre nom : courbe du crabe. Voir aussi : Walter Wunderlich, Über die Hundekurven mit konstantem Schielwinkel, Monatshefte für Mathematik, 1957, Volume 61, Issue 4, pp 299-303. |
| Système différentiel : ,
menant, pour ,
soit |
| Les courbes de poursuite orthogonale sont les trajectoires
d'un mobile
M dont le mouvement est dirigé à chaque
instant perpendiculairement à la direction d'un autre mobile M0
(l'initiateur), les deux mobiles ayant des vitesses proportionnelles La trajectoire de M0 étant donnée, celle de M est donc définie dans ce cas par le fait que (MM0 ) est perpendiculaire en M à sa trajectoire, et l'abscisse curviligne de M est proportionnelle à celle de M0 : On peut imaginer un crabe en M qui marcherait toujours face à l'initiateur M0 et on pourrait appeler ces courbes "courbes (de poursuite) du crabe". |
 |
I) Dans le cas où M0
a un mouvemnt rectiligne, les trajectoires du "crabe" sont appelées
"courbes de Duporcq".
Egan a montré qu'alors le vecteur ![]() a
le même mouvement qu'un corps en attraction newtonienne, et décrit
donc une conique d'excentricité e (d'où
l'explication du choix de e pour le rapport des vitesses, au lieu
du classique k).
a
le même mouvement qu'un corps en attraction newtonienne, et décrit
donc une conique d'excentricité e (d'où
l'explication du choix de e pour le rapport des vitesses, au lieu
du classique k).
Premier cas : ![]() ,
cas elliptique.
,
cas elliptique.
Paramétrisation cartésienne : 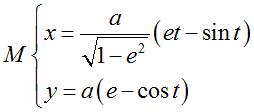 , ,  , ,  . .
Abscisse curviligne :  . . |
| Ci-contre, en bleu, est indiqué le mouvement elliptique
du vecteur La courbe de Duporcq est dans ce cas l'image par une affinité de rapport  d'une
cycloïde
allongée de rapport d'une
cycloïde
allongée de rapport NOTA 1 : c'est le seul rapport d'affinité qui permet d'intégrer l'abscisse curviligne par fonctions élémentaires. NOTA 3 : dans les expressions ci-dessus, et comme on le remarque dans l'animation ci-contre, les vitesses de M et de M0 sont proportionnelles, mais non constantes. |
 |
Deuxième cas : ![]() ,
cas parabolique.
,
cas parabolique.
a) le crabe et l'initiateur ont, à un instant
donné, des vitesses de même sens : le crabe suit évidemment
une droite parallèle à celle suivie par l'initiateur.
b) le crabe et l'initiateur ont, à un instant donné, des vitesses de sens contraire.
Paramétrisation cartésienne :  , , , , 
Abscisse curviligne : |
| Ci-contre, en bleu, est indiqué le mouvement parabolique
du vecteur La courbe de Duporcq n'est autre, dans ce cas, que la cubique de Tschirnhausen. NOTA : le mouvement de M est composé d'un
mouvement parabolique |
 |
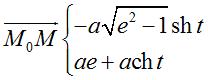
Troisième cas : ![]() ,
cas hyperbolique.
,
cas hyperbolique.
a) le crabe et l'initiateur sont au même point à un instant donné : ils suivent deux droites sécantes.
Ce cas est exclu dans la suite.
b) le crabe et l'initiateur ont, à un instant donné,
des vitesses de même sens :
Paramétrisation cartésienne :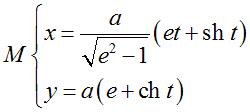 , , 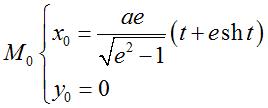 , ,
Abscisse curviligne : 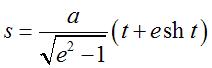 . .
Ci-contre, en bleu, est indiqué le mouvement hyperbolique du vecteur |
 |
c) le crabe et l'initiateur ont, à un instant donné,
des vitesses de sens contraire :
Paramétrisation cartésienne : 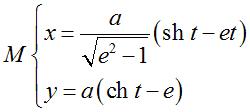 , , 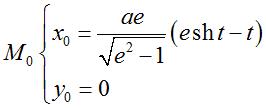 , , 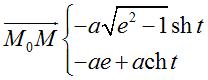 . .
Abscisse curviligne : 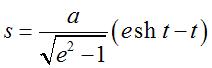 . .
Ci-contre, en bleu, est indiqué le mouvement hyperbolique
du vecteur |
 |
REMARQUE : Mannheim a montré que la courbe de Duporcq
de paramètre e est la roulette
à base rectiligne du pôle de la spirale
de Sturm vérifiant ![]() .
.
II) Cas où l'initiateur décrit
une courbe quelconque :
Équation différentielle vectorielle : 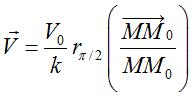 ,
se traduisant par le système différentiel : ,
se traduisant par le système différentiel :
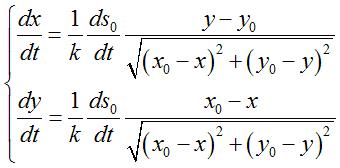 ( ( |
Pour un initiateur sur le cercle de centre O et
de rayon R, on obtient le système différentiel :  permettant de tracer les courbes à l'aide d'un logiciel.
permettant de tracer les courbes à l'aide d'un logiciel.
|
Un exemple avec k = 1. |
Un exemple avec k = 1/3. |
La courbe de filature
associée au mobile décrivant un cercle (en bleu ci-dessous)
et à un point du cercle (l'arbre) fournit un cas particulier circulaire
de courbe du crabe associée à un cercle.
Si Ci-dessous un exemple avec k = 1/2, |
 |
 |
 |
VARIANTE (sur une idée d'Alain Esculier) : la vitesse
du crabe n'est plus proportionnelle à celle de l'initiateur, mais
à la distance à celui-ci.
Équation différentielle vectorielle :  ,
se traduisant par le système différentiel linéaire
: ,
se traduisant par le système différentiel linéaire
:  . .
Équations du mouvement du crabe :  . . |
I) Initiateur rectiligne.
Pour un initiateur (vt, 0), équations du
mouvement du crabe passant par (0, b) :
 (a = v/k).
(a = v/k).
C'est donc une trochoïde de rapport  ,
qui est une cycloïde si ,
qui est une cycloïde si |
 |
II) Initiateur circulaire.
Pour un initiateur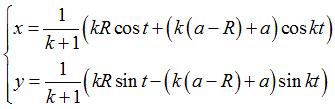 .
Il s'agit d'une épitrochoïde
pour .
Il s'agit d'une épitrochoïde
pour |
 |
|
Pour 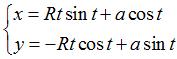 ,
qui n'est autre qu'une développante
de cercle (plus précisément, développante du cercle
parcouru par l'initiateur). ,
qui n'est autre qu'une développante
de cercle (plus précisément, développante du cercle
parcouru par l'initiateur). |
 |
| courbe suivante | courbe précédente | courbes 2D | courbes 3D | surfaces | fractals | polyèdres |
© Robert FERRÉOL
2015
 et d'un mouvement de translation.
et d'un mouvement de translation.